
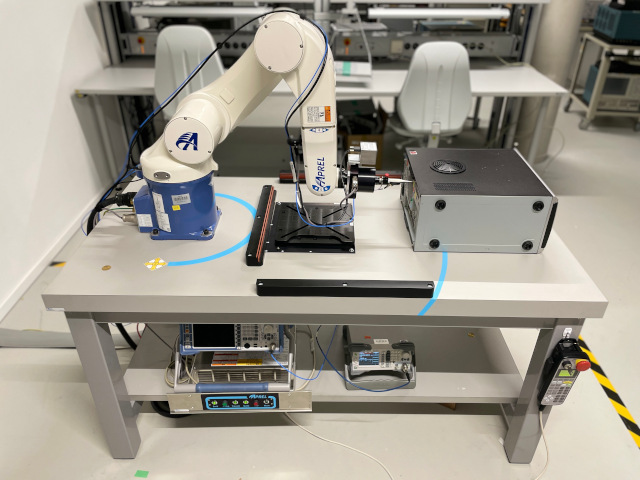
Nahfeldscanner
- Nahfeldmessung 9 kHz bis 6 GHz und Fernfeld-Approximation
- Sechs-Achsen-Roboter (X/Y/Z + 360 Grad Drehung)
- Schrittauflösung und Wiederholbarkeit < 50 um
- Miniaturisierte E-/H-Feldsonde (Spitzengröße < 2 mm)
- Messbarer Rauminhalt (75cm x 75cm x 60cm)

- Sichere Oberflächen- und Kollisionserkennung
- Universeller Server für die Fernsteuerung
- TCP/IP LAN-Bus für Kommunikation und Steuerung
- Bildaufnahme, Kontrolle und Kalibrierung
Der Nahfeldscanner ist das ideale Messgerät, das im Nahfeldbereich elektrische bzw. magnetische Felder von wenigen kHz bis zu 6 GHz detailliert messen kann. Auf diese Weise lässt sich ein genaues Abbild in 2-D oder 3-D der gesamten Feldverteilung an einem Prüfling (DUT), welches ggf. vorher mit CONCEPT-II simuliert wurde, messtechnisch sichtbar machen. Mit der roboterarm-geführten Nahfeldsonde werden einzelne Messpunkte mit hoher räumlicher Präzision elektrisch abgetastet. Die häufigsten Messobjekte sind mit Bauteilen bestückte und oft in Modellentwicklung befindliche PCBs sowie kleinere Antennenstrukturen. Elektrische Funktionen von Schaltungen – besonders an kleinen Teststrukturen – sind so besser zu verstehen und Fehler leichter zu orten, da sich mit dieser Messmethode einzelne und kleinste Störquellen auf dem Prüfling schneller finden lassen. Mit Hilfe von Rastereinstellungen und einzelnen Abtastungen an diskreten Eckpunkten lassen sich schnell die räumlichen Bereiche am DUT festlegen. Nach Eingabe aller Parameter und Start des Sechs-Achsen-Roboters erfolgen die individuell notwendigen Abtastungen selbstständig und voll automatisch. Dabei liefern die angeschlossenen Messgeräte zu jeder Abtastung aktuelle Messwerte für die Robotersoftware. Die aufgenommenen Messwerte der Nahfeldsonde und der angeschlossenen Messgeräte werden zusammen als sogenannter Nahfeldscan gespeichert. Nach Beendigung aller Abtastungen am DUT, wird der gesamte Nahfeldscan sofort mit sämtlichen Messdaten in einem umfangreichen Ergebnisprotokoll angezeigt. Alle notwendigen Messgeräte müssen betriebsbereit mit dem Robotersystem verbunden sein. Am Kontrollgerät des Robotersystems sind alle Sicherheitseinstellungen auf einwandfreie Funktion zu überprüfen. Nach dem Login der Steuersoftware ist zunächst die Kalibrierung der Nahfeldsonde vorzunehmen. Mit sicherem Abstand zum Roboterarm und mit Hilfe der Kalibriersoftware wird die Sonde mittels Tastensteuerung des Handbediengerätes vorsichtig auf den Kalibrier-Messpunkt der Arbeitstischplatte gesetzt. Der Roboterarm lässt sich mit verminderter Bewegungsgeschwindigkeit exakt fein steuern und fährt nach erfolgter Kalibrierung wieder selbstständig in seine Bereitschaftsstellung. Auch für Untersuchungen von Streuparametern sowie Immunitäts- und Störanfälligkeitstests kann die Messsonde in ein software-bekanntes Feld (Referenz-Mikrostreifenplatine) gebracht werden. Erste abzutastende Positionen des Roboterarmes am DUT werden mit dem Handbediengerät durchgeführt. Mit dem PC-Programm werden dann anschließend notwendige Start- und Format-Einstellungen eingegeben, die Auswahl der H- und E-Feld Messungen sowie die notwendigen Messparameter. Der Roboter tastet nach dem Starten alle eingestellten und errechneten Positionen vollautomatisch ab. Das Robotersystem ist mit umfangreichen Sicherheitsvorkehrungen u.a. Erkennung und Schutzabschaltungen von axialen und radialen Kollisionen mit der Sonde ausgestattet. Während der Roboter im Automatikbetrieb ist, darf sich aus Sicherheitsgründen keine Person beim Roboter bzw. im EMV-Labor aufhalten.